
-

客服電話
400-7007-555 -

在線客服
-

Online

-

公眾號


回到頂部


產品技術
Product technologies
基于物聯傳感+信息化+大數據, 提供高端分析儀器儀表、信息化軟件、運維服務、
運營服務、檢測服務、咨詢服務及環境治理裝備等創新產品和業務組合。
立即咨詢 運營服務、檢測服務、咨詢服務及環境治理裝備等創新產品和業務組合。
通用科學儀器
環境監測儀器
工業過程(cheng)分析儀器
智能裝備(bei)
智慧管理平臺
第三方服(fu)務
診斷與生(sheng)命科學
- 通用科學儀器


-
質譜
-
光譜
-
色譜
-
前處理
-
流動注射
-
全自動實驗室


- 環境監測儀器


-
大氣環境
-
水環境
-
氣污染源
-
水污染源
-
便攜/走航
-
信息化
-
治理規劃


- 工業過程分析儀器


-
工業激光
-
工業紫外
-
工業質譜
-
紅外/熱導
-
報警儀


- 智能裝備


-
環保裝備
-
工業裝備


- 智慧管理平臺


-
環境信息化
-
水利水務信息化
-
生態綜合發展信息化


- 第三方服務


-
-
應急監測
-
第三方檢測
-
治理規劃
-
其他


- 診斷與生命科學
-

USV-2300河(he)床地形勘測無人船
無人(ren)(ren)船(chuan)系(xi)統(tong)(tong)由無人(ren)(ren)船(chuan)體、遙(yao)控器、地(di)面(mian)基站、微型定(ding)位系(xi)統(tong)(tong)、測深儀和(he)地(di)面(mian)站軟(ruan)件組成。操作員可以(yi)通過地(di)面(mian)站設置無人(ren)(ren)船(chuan)進(jin)行自(zi)動(dong)駕駛。在航行的同時,自(zi)動(dong)采集江河(he)湖庫河(he)床地(di)形、水(shui)面(mian)視頻圖像(xiang)和(he)無人(ren)(ren)船(chuan)狀態信(xin)息。
了解詳情 -

USV-2400流(liu)量流(liu)速走航無人船
無(wu)人船(chuan)系(xi)(xi)統由無(wu)人船(chuan)體、遙控器(qi)、地面(mian)基站、微型定位(wei)系(xi)(xi)統、ADCP和地面(mian)站軟件組成。操作(zuo)員可用遙控器(qi)對(dui)無(wu)人船(chuan)進行(xing)手動(dong)控制;也可以通過地面(mian)站設置(zhi)無(wu)人船(chuan)進行(xing)自動(dong)駕駛。在航行(xing)的同時(shi),自動(dong)采集江河湖庫(ku)斷面(mian)的流量流速、水面(mian)視頻圖像和無(wu)人船(chuan)狀(zhuang)態信息(xi)。
了解詳情 -
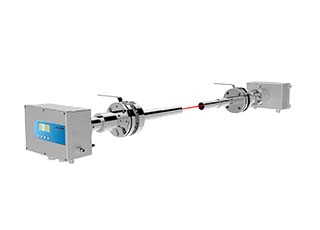 CLA-8000激光燃燒分析儀CLA-8000激光燃燒分析儀是基于半導體激光吸收光譜(DLAS)技術,無須采樣預處理系統,能夠在高溫、高粉塵、高腐蝕等惡劣的環境下進行在線氣體濃度測量的高端爐窯氣氛實時監測分析儀表。了解詳情
CLA-8000激光燃燒分析儀CLA-8000激光燃燒分析儀是基于半導體激光吸收光譜(DLAS)技術,無須采樣預處理系統,能夠在高溫、高粉塵、高腐蝕等惡劣的環境下進行在線氣體濃度測量的高端爐窯氣氛實時監測分析儀表。了解詳情 -
 FOCS-8000 加熱爐燃燒優化控制系統FOCS系統是采用爐膛殘氧&一氧化碳閉環優化的控制方案,使用CLA-8000激光燃燒分析儀檢測氧氣和一氧化碳氣體濃度,具有連續監測爐內氣氛、燃燒狀態自動尋優、獨立優化各段空燃比功能。了解詳情
FOCS-8000 加熱爐燃燒優化控制系統FOCS系統是采用爐膛殘氧&一氧化碳閉環優化的控制方案,使用CLA-8000激光燃燒分析儀檢測氧氣和一氧化碳氣體濃度,具有連續監測爐內氣氛、燃燒狀態自動尋優、獨立優化各段空燃比功能。了解詳情




















